I’ve got a question about the calibration method for the Eye to Hand procedure: Is it possible to mount the calibration board not directly on the flange of the robot but maybe on a support, always mounted on the robot, that just shift the calibration board slightly down?
Example: I have an already gripper tool on the robot and i need to do a calibration, can i just make the robot pick the calibration board an redo the calibration (suppose that the gripper is stable and do not vibrate) ? Or should I disassemble the gripper and then mount the calibration board?
Yes, you can mount the calibration board anywhere on the last axis given that the relative position of the flange and the calibration board is fixed and no vibrations occur. E.g. you can mount an intermediate part between flange and calibration board or mount the calibration board directly onto the gripper.
Calibrating a camera regarding its position to the robot is an optimization problem (Calibration Principles):
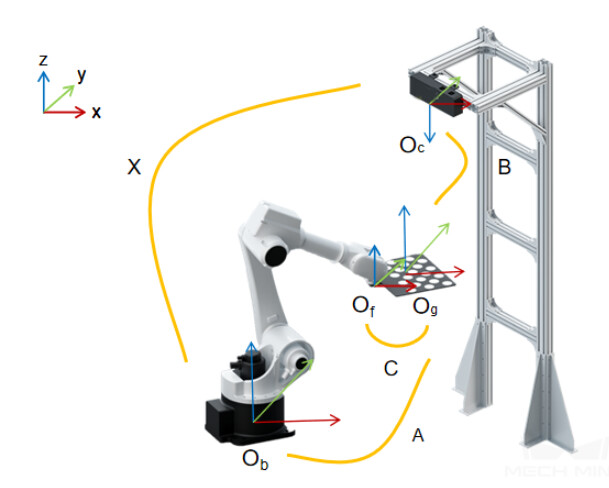
The position of the flange (A) and the pose of the calibration board relative to the camera (B) are known. Unknown are the relative pose of the camera to the robot (X) and the relative pose of the flange to the calibration board (C). There exists a closed-loop relationship between all entities and it becomes an optimization problem to find the solution of X (and C as a side-product).
Therefore, as long as the relative pose of the flange and calibration board are fixed (C is static) you are free to mount the calibration board whereever you like.
1 Like