Background
In projects with high accuracy requirements, the accuracy of the TCP will directly affect the accuracy of the robot’s performance. Therefore, after completing vision calibration and tool mounting, TCP calibration is necessary for the tool of the robot.
There are various methods for TCP calibration, and this passage mainly introduces YASKAWA’s five-point calibration method, where the coordinate axis orientations of the tool remain consistent with the coordinate axis orientations of the robot flange.
Procedures
Step 1: Select MANAGEMENT MODE for SECURITY
Click SYSTEM INFO → SECURITY.

Select MANAGEMENT MODE from the drop-down list. The default password for MANAGEMENT MODE is 9999999999999999 (the #9 key 16 times).

Step 2: Open the TOOL Interface
Click ROBOT in the main menu, and then click TOOL.

Step 3: Select the Tool Number
In the TOOL interface (for example, calibrating for the fifth tool), move the cursor to 05, and press ENTER on the teach pendant to open the TOOL NO. 05 interface.

Make sure the teach pendant is in the TEACH mode. In the TOOL NO. 05 interface, click UTILITY on the top of the screen, then click CALIBRATION.

Step 4: Teach Five Points
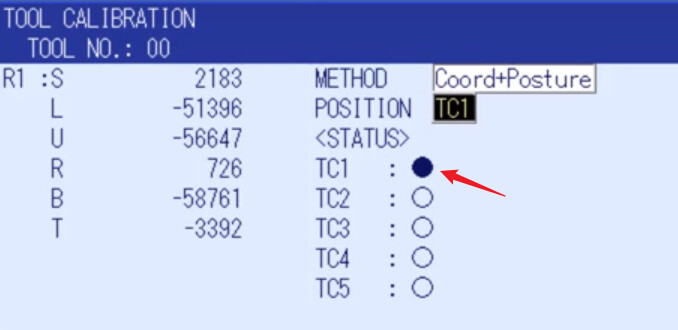
In the TOOL CALIBRATION interface, select TC1 for POSITION, and jog the robot to move the tool’s tip to approach TC1.

When the tool’s tip touches TC1, press MODIFY on the teach pendant, and then press ENTER to complete recording TC1.

The STATUS for TC1 displayed on the screen should be a solid circle now.
Repeat the same operations for TC2, TC3, TC4, and TC5.

After recording all five points, and the STATUS are all solid circles, press COMPLETE on the bottom left of the screen to complete the calibration.

Step 5: Update the TCP Data in Mech-Viz
The TCP data will be displayed on the screen. Manually update the TCP data in Mech-Viz.
Screenshots in this passage are from the following videos: