The Mech-Vision or Mech-Center alarms display the following errors:
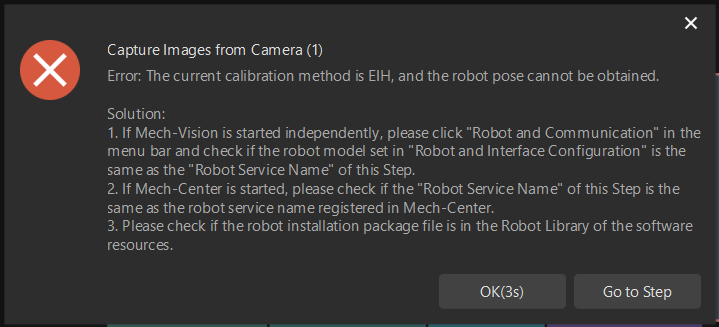

There are mainly two common types of errors, and the solutions for these specific errors are as follows
I. The robot service name is not filled in
This situation is often overlooked. You only need to fill in the “Robot Service Name in Mech-Center” parameter in the “Capture Images from Camera” step with the same robot service name as in Mech-Center.

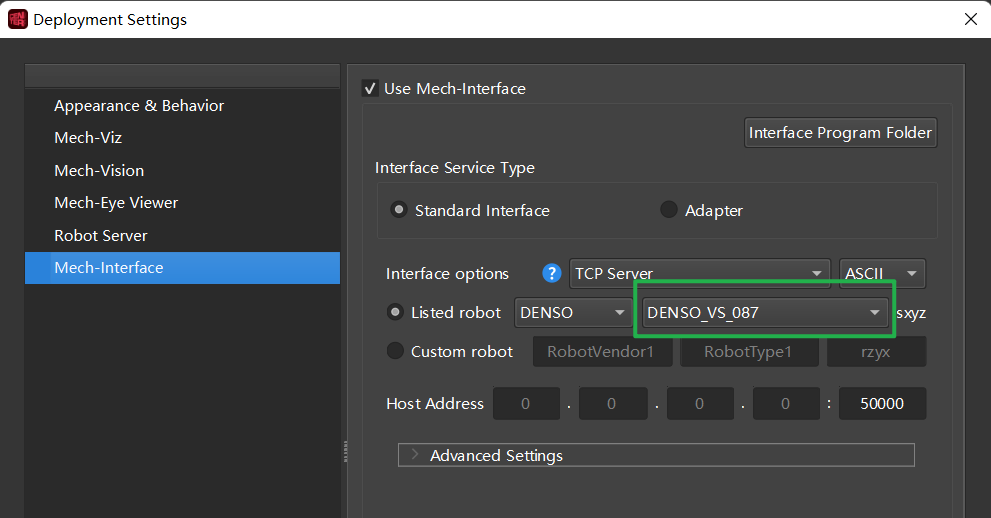
You can check the “robot service name” at the following location (interface):
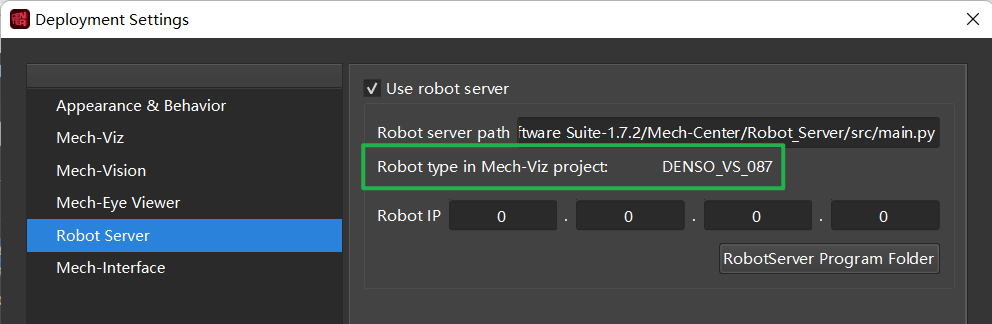
or (Mech-Viz Control):
II. It is EIH, but communication has not been properly established, and it cannot get the pose from the robot or PLC end.
Generally, EIH communication has not been established, but it is necessary to get the flange pose from the robot end for visual end testing (generally manual testing). Use the network assistant to simulate interface communication and send the robot flange pose.
Below are the operations for using the NetAssist assistant to send the robot pose.
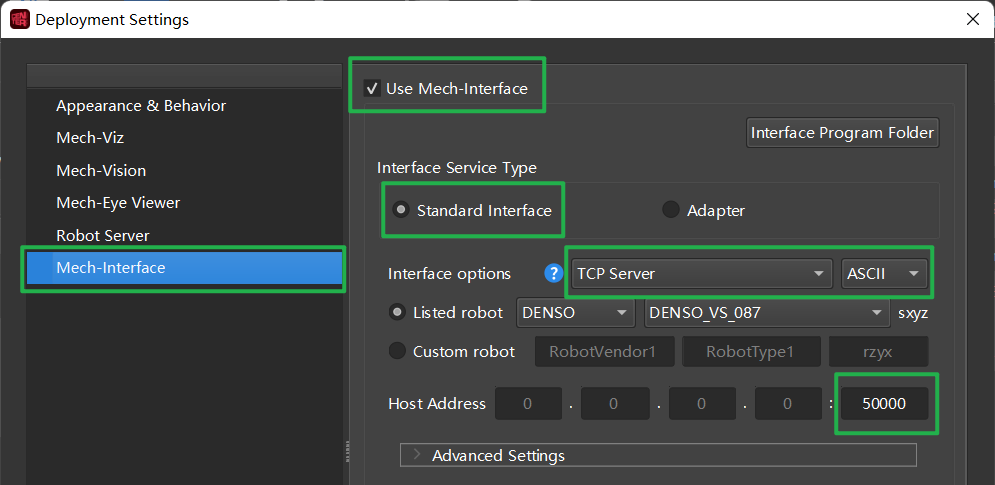
- Open the “Deployment Settings”, follow the settings below (note the port number)
- Open the interface service.

- Use the network communication assistant, find “NetAssist” in the Tool folder under Mech-Center.
- Follow the settings below (note that the port number is consistent with Mech-Center), and connect to the NetAssist.

Follow the standard interface document on Docs and use the “101 command” to send the robot flange pose. The pose format refers to the document
The command message for EIH to obtain the flange pose:
“101,1,0,2,200,300,400,1,0,0”
Note: This is an assumed pose for demonstration purposes. The actual robot’s current pose must be filled in when triggered. The pose must be in Euler angles format.

5. After testing, it is confirmed that the flange pose can be successfully sent to Mech-Vision.
