Background:
During the project implementation and post-sales phase, there are occasional situations where the external reference accuracy meets the requirements, and the point cloud view in Mech-Vision also meets the picking requirements.
However, there are still inaccuracies in grasping. For example, the workpiece can be grasped in the forward direction, but there is a deviation when grasping in the reverse direction.
The pick point made by the drag-and-drop method has a deviation from the actual position for picking. It is very likely that the robot’s zero point has been lost, the robot has lost its absolute accuracy, or there is a problem with the TCP taught.
Note: When this problem occurs, prioritize checking the robot’s zero point. The following methods should be used only after confirming that the zero point is correct.
How to quickly verify the robot’s absolute position accuracy
Method: Measure the distance between two points.
Procedure:
- Take two points each on the XYZ axes and the diagonal.
- Move the robot a distance X, measure the actual distance X’, and calculate the deviation between the two values, denoted as ΔX.
- If this value deviates too much (beyond the grasping accuracy), it indicates an anomaly in absolute position accuracy.
Note: Measure in multiple directions, such as all three X, Y, and Z directions, and measure multiple times in different positions to get an average. After encountering this problem:
The robot’s accuracy needs to be calibrated until ΔX meets the visual accuracy and grasping accuracy requirements.
How to verify if there’s an issue with the robot’s TCP
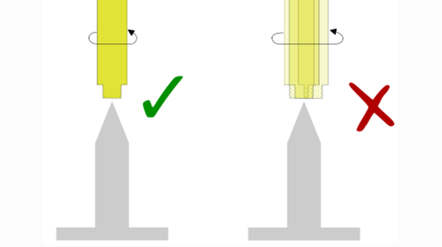
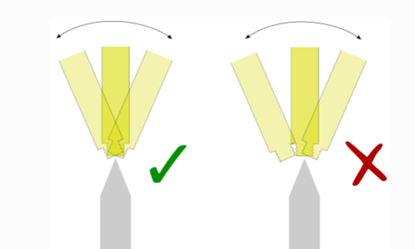
Method: Fix the position of TCP which changing the robot’s pose, i.e., rotating around a fixed TCP.
Procedure: Prepare a sharp point (a pen will do). Calibrate its corresponding TCP value at the robot end. Then, rotate around the TCP in different rotation directions (Rz, Ry, Rx) at large angles and observe the fluctuation of the position of robot’s tool relative to the sharp point’s position, as shown in the following diagram.
After seeing unacceptable fluctuation, it is necessary to re-teach the TCP until there is no significant difference in rotation (i.e., it meets the grasping accuracy requirements).