Here’s the translation:
-
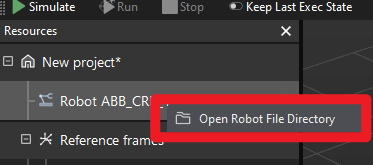
Open Mech-Viz, create a new project, and select this brand of robot. In the resource tree, right-click on the robot model and open the robot file directory.
Go to directoryMmind/robot/robot_ability.
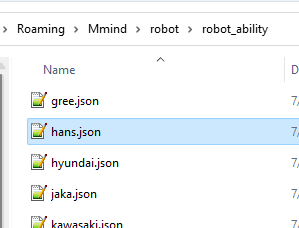
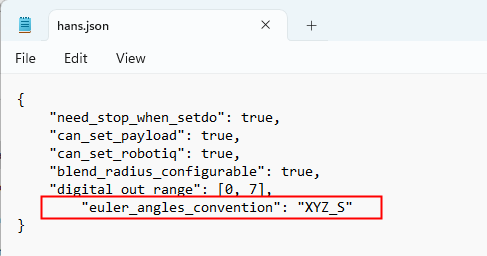
Open or create the json file corresponding to the brand name with Notepad. In the file, add the field for this brand and its Euler angle convention. Save and close. This allows Mech-Viz to recognize the Euler angle conventionof this brand.
For example, XYZ_S_A,B,C: where XYZ_S indicates the Euler angle convention, and the suffix _A,B,C represents the labels for axes 4 to 6 on the teach pendant (if you’re unsure about the suffix, you can omit it). -
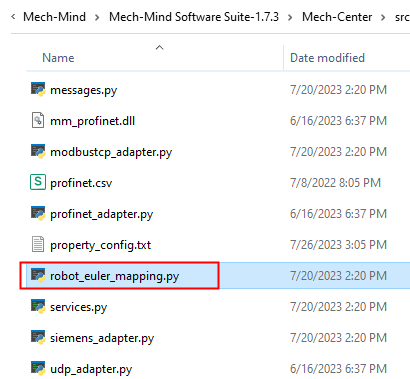
In the installation directory of the software, locate the file corresponding to the screenshot below. Open it with Notepad and add the field for this brand in the file. This enables Mech-Vision to provide the calibration option for this brand’s standard interface.
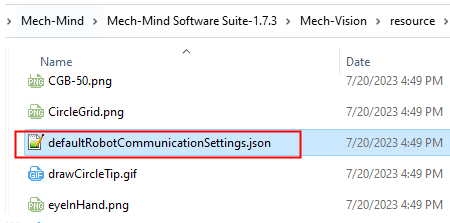
For example, if using TCP/IP ascii communication, you can copy the fields from other brands. Save and close. -
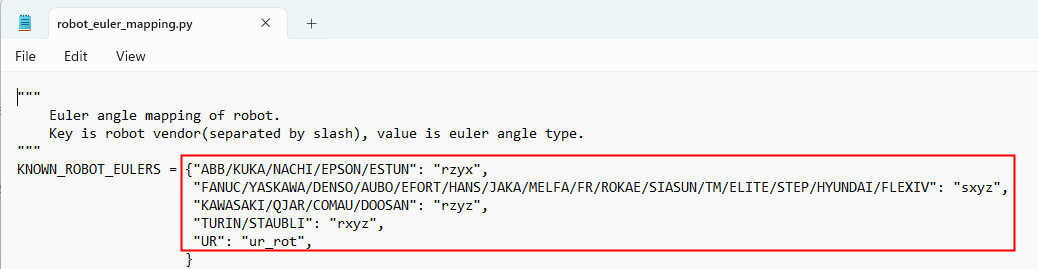
In the software’s installation directory, locate the file corresponding to the screenshot below. Open it with Notepad, and then add the brand name under the appropriate Euler angle convention. Separate it from other brand names using a ‘/’. Save and close. This is to set the correct Euler angle convention for the standard interface communication.