For V4 DEEP or LSR, when using an external camera to capture color images, what method can be used to resolve the issue when an alarm indicates that the image sizes are inconsistent?
For LSR series and DEEP V4 cameras, when selecting “External Color Image” for the camera’s 2D image, please take note of the followings.
Possible reason of the issue:
You used the depth map of the highest layer in your project but you did not select the “Rectify to Depth Map” option in the parameters of Step “Capture Images from Camera”
Selecting the “Rectify to Depth Map” option can solve the issue.
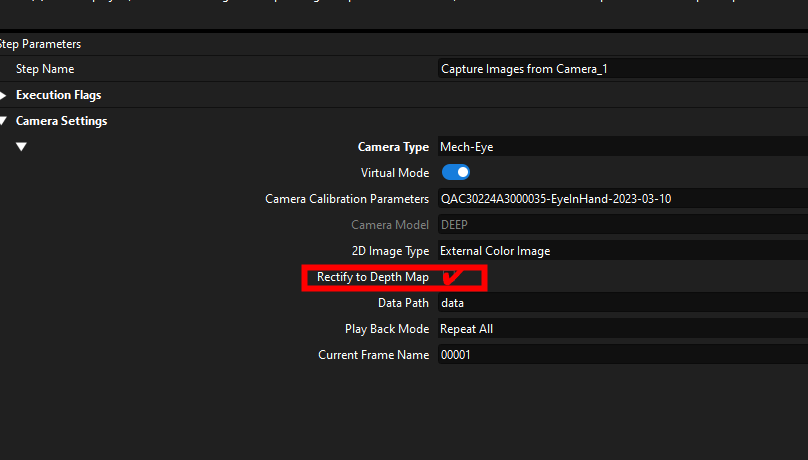
After enabling “Rectify to Depth Map” in the parameters of Step “Capture Images from Camera”, if there are missing parts in the depth map, the output color image from the camera will also have missing parts.
Whether to enable “Rectify to Depth Map”:
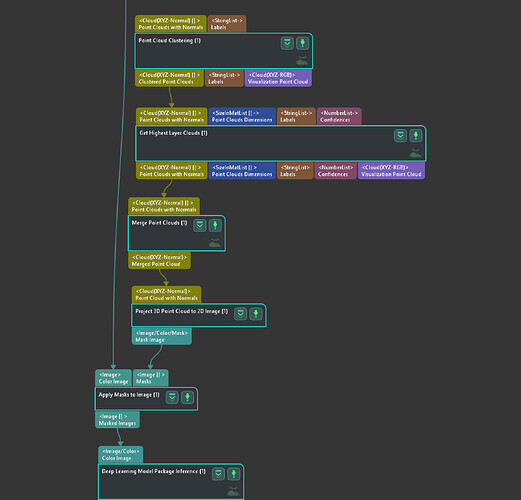
a. In cases where the point cloud is of good quality, and you need to obtain the corresponding color image using the highest depth map, it is recommended to enable this option (though in this case, you can also first obtain the highest-layer point cloud and then project it to a 2D image without enabling “Rectify to Depth Map”, as shown below).
b. For some highly reflective workpieces where depth information is required but the depth data is defective, it is recommended not to enable this option. Enabling it may lead to missing color information, which may affect the performance of deep learning recognition.