When we use Ethernet IP to communicate with AB PLC, will the block need to be called multiple times to receive all the point data? Or is the point data being sent across all at once?
Why the data type of Target_Pose_O cannot be DInt [20,6]?
Why the data type of Target_Label_O cannot be UDInt [20]?
- By default, this command can only fetch at most 20 TCPs at a time. Therefore, the command may need to be repeatedly executed until all TCPs required are obtained if the total number of the TCPs is more than 20.
- The max number of the Target_Poses and the Targer_Labels could be sent at a time is 20.
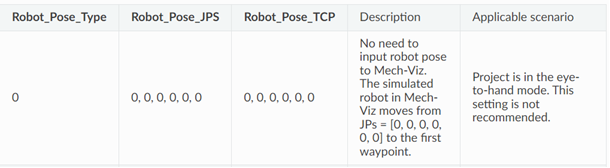
The Pose_JPS and Pose_TCP is like 0,0,0,0,0,0, totally 6 numbers.
So the data type of Target_Pose_O is Array[0…19, 0…5] of DInt and the data type fo Target_Label_O is Array[0…19]
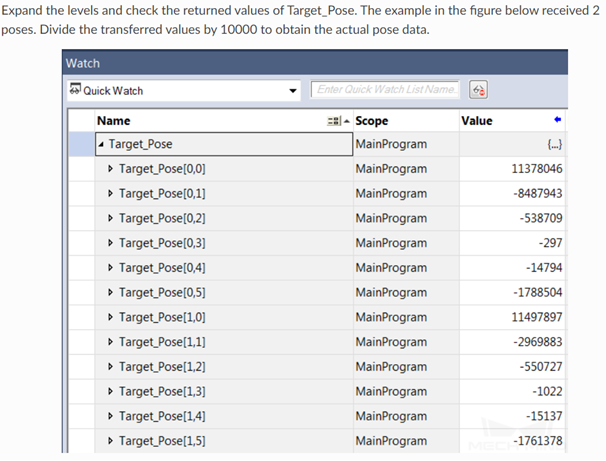
For example, Send_Pose_Num is 2 and the vision system can send 2 poses. Then the Target_pose will be returned like: