In an Eye-in-Hand (EIH) scenario, when teaching pick points in Mech-Vision, I can only fill in the “picking pose” and “TCP” (Tool Center Point). There is no option for an “Image Capturing Pose.”
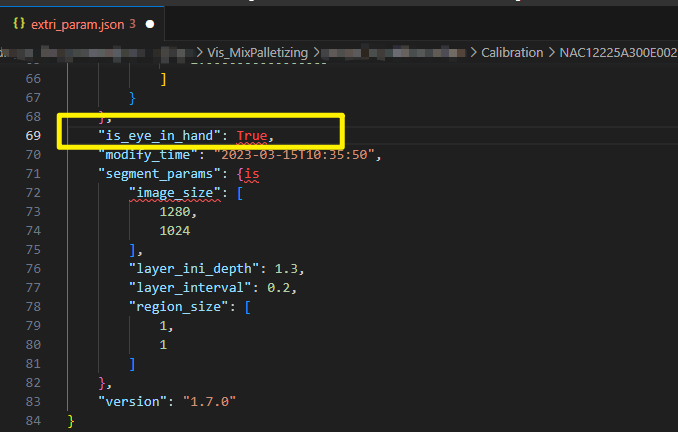
You need to ensure that in the “extri_param.json” file within the external parameter folder under the “calibration” directory in the project’s root directory, the “is_eye_in_hand” parameter is set to true. Afterward, restart Mech-Vision.