The Euler angle convention for UR robots is in the form of a rotation vector, which Mech-Viz does not have.
You can switch the robot’s Euler angle convention displayed on the teach pendant by changing the Euler angles to RPY, which corresponds to ‘sxyz’ in Mech-Viz.
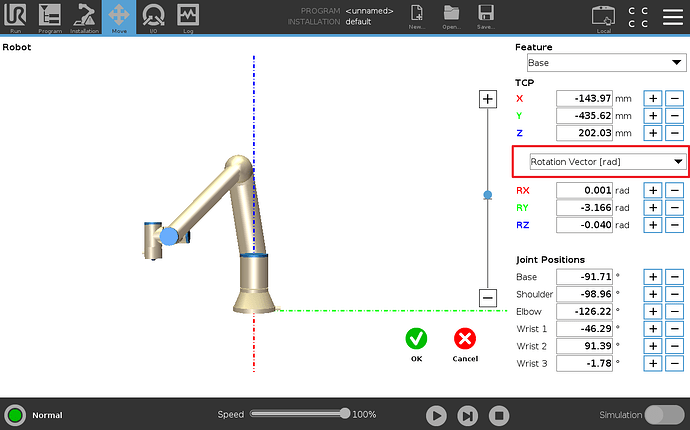
Here’s how to switch it (using UR_5E as an example):
In the Move interface, click anywhere inside the red box area shown in the image below:
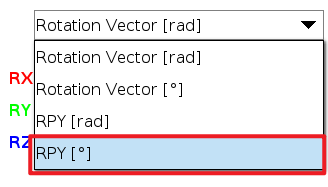
Select Euler angle convention as RPY[°], corresponding to ‘sxyz’ in Mech-Viz.