Translation:
When receiving data using functions like MM_Get_VisData, the robot reports an error as mentioned in the title.
Cause: The received string is too long, exceeding the length predefined in the program variables.
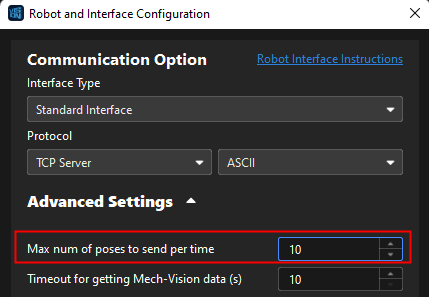
Solution: Limit the number of poses sent from the vision system to the robot to restrict the overall string length. Open “Robot and Interface Configuration” in Mech-Vision, find advanced settings, and modify “Max num of posese to send per time” to 10 or even lower.