Issue:
Anomalies in TCP Z-value for robots like FANUC in the planning results of Standard Interface command 210.
Solution:
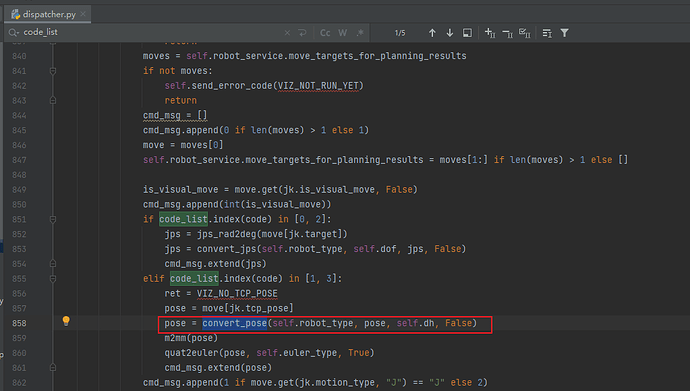
Add a line in dispatcher.py located in the interface directory under the src directory in the Mech-Center directory.
pose = convert_pose(self.robot_type, pose, self.dh, False)