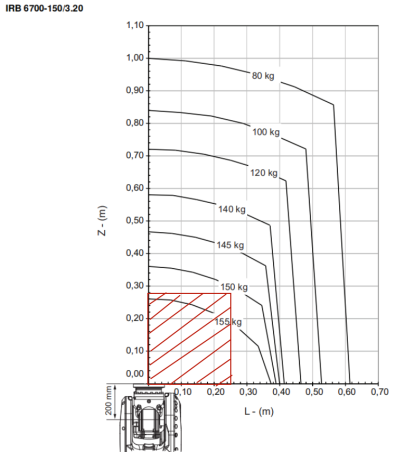
Robot payload verification
When verifying the payload of the robot, factors such as the weight of the end tool, the target object, pipeline, etc., should be comprehensively considered. The correlation between the center of gravity and torque of the robot J6 flange should comply with the diagram of the payload, as shown below.
Robot reachability confirmation
Robot reachability can be confirmed through various methods such as Mech-Viz, CAD, Robcad, RobotStudio, etc. (1. Robot reachability range | 2. Stack dimension information):

Robot degrees of freedom
This section lists the notes for sack depalletizing projects and open-top turnover box depalletizing projects.
Sack depalletizing projects
When choosing the number of degrees of freedom for the robot in sack depalletizing projects, note the following points:
-
The possible placement of incoming sacks should be thoroughly considered. When the sacks appear tilted with pitch and roll angles, as shown in the figure below, it is recommended to choose a six-axis robot.

-
The needs of subsequent processes should be taken into account. When the robot needs to adopt multiple postures for pouring after depalletizing, as shown in the figure below, it is recommended to choose a six-axis robot.

Open-top turnover box depalletizing projects
When choosing the number of degrees of freedom for the robot in open-top turnover box depalletizing projects, note the following points:
- Due to the inconsistent levelness of the tray or tray placement surface, incoming turnover boxes may be tilted. A four-axis robot cannot meet the requirements.

- When picking multiple boxes, there is a deviation angle on the upper surface of the turnover boxes as shown in the image. A four-axis robot cannot meet the requirements.

Confirmation of communication with vision system
The selected robot model must support seamless communication with the vision system.
If the project utilizes standard interface communication methods, it is necessary to confirm that the chosen robot brand and model support standard interface communication with the vision system, and the robot controller meets the necessary software and hardware requirements. For details, please refer to the manual section on Standard Interface Communication.
If the project employs master control communication methods, please confirm that the selected robot brand and model support master control communication with the robot, and the robot controller meets the required software and hardware specifications. For details, please refer to the manual section on Master Control Communication.