How to move robot line from pose 1 to pose 2 on the same workpiece surface, what step library should I use in mech-vision?

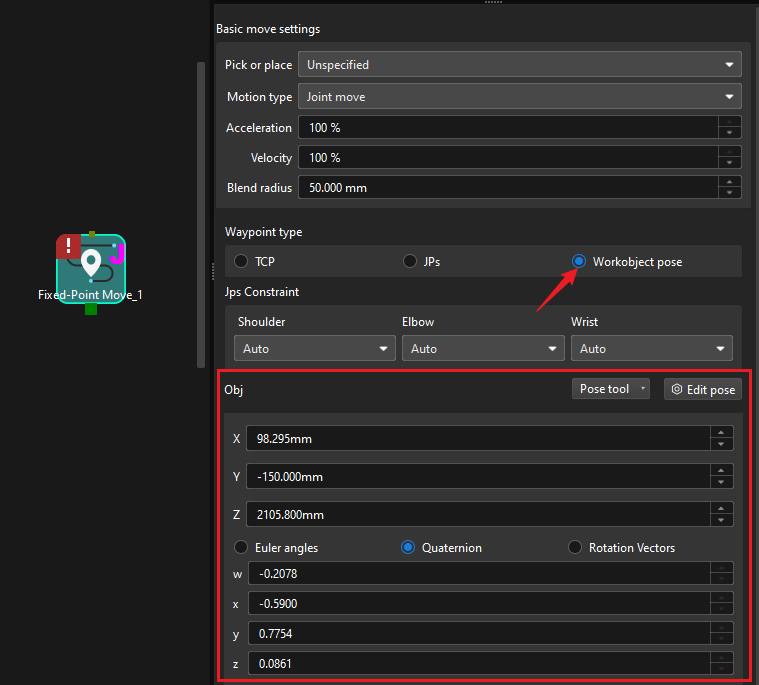
To move the robot from pose 1 to pose 2, you can use the Fixed-Point Move Step in Mech-Viz.
In the Basic move settings panel, select Workobject pose for the waypoint type and input the poses. For detailed instructions on this Step, please refer to Fixed-Point Move.
I mean the pose sent by mech-vision to the robot. In the picture, there are 2 poses located on 1 workpiece surface
Which step library should I use to have 2 or more poses on 1 workpiece?
If you want to obtain 2 or more poses on the same workpiece, first use the Matching Model and Pick Point Editor to add one geometric center point and multiple pick points for the matching model. Here’s the documentation link for the Editor: Matching Model and Pick Point Editor.
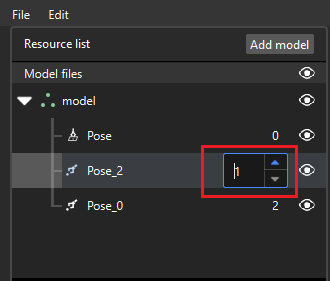
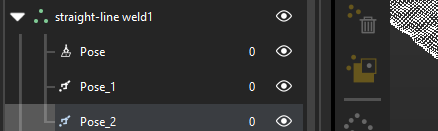
The figure below gives you an example of setting multiple pick points for the same workpiece model. “Pose” represents the geometric center points, “pose_1” and “pose_2” represent pick points.

Then use the Map to Multiple Pick Points Step in Mech-Vision to calculate multiple pick points of the workpiece. This Step uses the geometric center points and their mapping relationships with pick points to calculate other pick point poses. Here’s the documentation link for this Step: Map to Multiple Pick Points.
Besides, we found a similar case in our community where you may find more useful information (if more than 2 pick points are needed). Here’s the link: (HELP !) How to perform edge gluing with mech vision?.
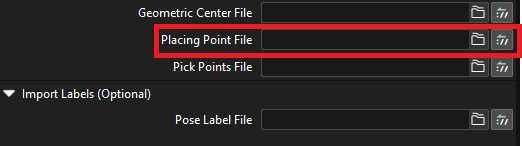
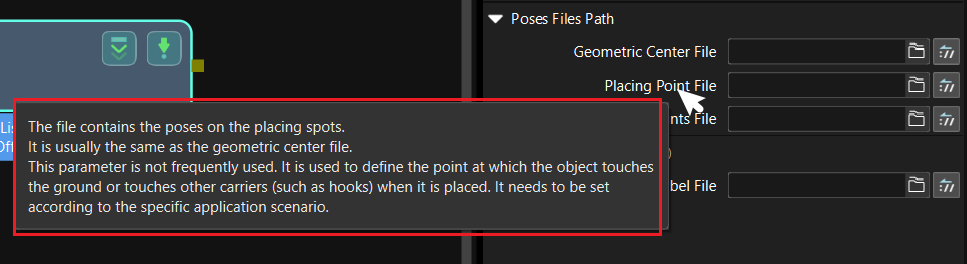
In step Map to Multiple Pick Points, the parameter is Placing Point File. Which file do I need to assign to this parameter? Because I have already found the file for the other 3 parameters, but as for that parameter, I cannot find a file to put in.Can you tell me which file to assign to this parameter? thank you very much.

You can double-click the number to edit it, as shown below.