Phenomenon:
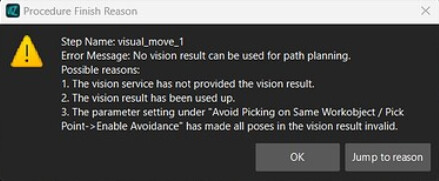
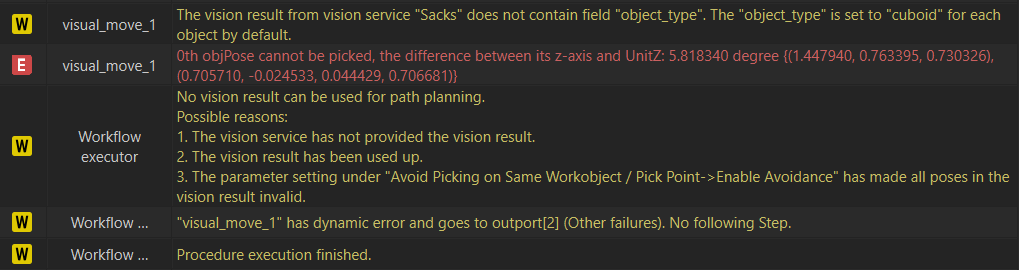
In sack depalletizing scenarios, four-axis robots in simulations often generate alarms related to planning failure, unreachable motions, or no results from Step “Vision Move”.
When manually manipulating the robot, it is possible to reach the vision pose points provided and any position within the entire stack. And Mech-Vision produces vision results.
Reasons:
The method for visually identifying sacks involves extracting a 2D image mask using deep learning, mapping it to a 3D point cloud, and then using “Calc Poses and Dimensions from Planar Point Clouds” to determine the position and orientation of the sacks. Due to the inconsistent shape and orientation of the sacks, after visual computation, the Z-axis of the sacks can have an angle relative to the robot’s base coordinate system Z-axis, implying that the sacks have tilted orientations (Rx, Ry).
Four-axis robots have only four degrees of freedom, namely: X, Y, Z, Rz. The Rz degree of freedom is parallel to the robot’s coordinate system Z-axis, allowing rotation compensation only around the Z-axis while maintaining parallelism.
Compensation is not possible for Rx and Ry orientations. When the object’s Z-axis has a small angle with the robot’s base coordinate Z-axis, Mech-Vision can automatically correct the object’s Z-axis to meet the grasp planning. However, if the angle is too large and exceeds the threshold, it will result in an error.
Solution approach:
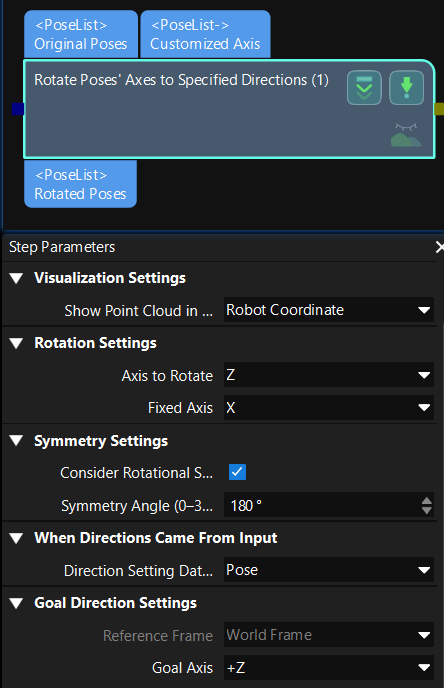
Before outputting the pose from Mech-Vision, correct the Z-axis orientation of the sacks using Step “Rotate Poses’ Axes to Specified Directions”. In the step parameters,“Axis to Rotate” is the Z-axis, and “Fixed Axis” should be set to None (since the object may rotate around the X or Y axis, or both, it cannot be fixed to a single axis before rotation).
Note:
Implement necessary error prevention measures before pose correction. Do not directly correct the Z-axis of all poses to be parallel to the robot’s base coordinate system Z-axis, to avoid misjudgement on sacks with significantly excessive tilts that require alarming.
In the early stages of project planning involving four-axis robots in scenarios like sack (cardboard box, turnover box) depalletizing, it is essential to be aware of the limitations of four-axis robots in compensating for objects with tilted orientations. You may need effective communication and reconsideration on project planning and design.