Introduction
Target Reader: Solution Engineers, Layout Planning Engineers, Mechanical Design Engineers, Mechanism Design Engineers, etc.
Post Overview: This post focuses on loading brake discs. It elaborates in detail on common challenges encountered in the industry, such as incoming materials for brake discs, picking, and corresponding solutions to address these challenges. This information provides significant guidance for the overall design of the loading brake disc solution, ensuring smooth progress through subsequent project phases.
Incoming brake discs in a tilted manner
Issue: Improper placement and vibrations from transportation can cause some of the stacked brake discs to tilt. If you use a 4-axis robot or 5-axis robot, it will not be able to effectively pick the brake discs.
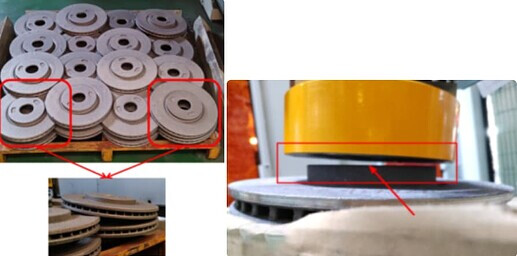
Solution: Standardize the incoming materials to ensure the stacks are steady. If necessary, you may consider reducing the stacking layers of brake discs to avoid extreme situations during transportation. In addition, it is recommended to use a 6-axis robot if possible.
Incoming stacks wrapped in stretch film
Issue: The entire stack of brake discs is wrapped in stretch film and the robot cannot pick them effectively, as shown in the image below.

Solution: Remove the stretch film manually before loading.
Camera FOV obscured by plastic film
Issue: When the camera captures images, if the objects are obscured by the plastic film inside the bin, the complete point clouds cannot be obtained after capturing images. In some cases, the bottom layer of objects is completely obscured, making it difficult to capture images and perform picking tasks.

Solution:
- Remove the plastic film manually before loading.
- You can use U-shaped clips to fix the plastic film on the upper edge of the bin to ensure that the plastic film in the bin fits tightly against the bin wall.
Interferences in picking caused by bin structure
Issue: The inner wall of the bin protrudes (as shown in the left image below) or the upper edge of the bin protrudes inward (as shown in the right image below). The robot interferes with these protrusions after picking up the brake disc and cannot successfully pick the objects from the bin.

Solution:
- Chang the bin’s structure to ensure that the inner walls are smooth and without protrusions, or use the pallet for loading to completely avoid this issue.
- Control the robot to first lift vertically upwards for a certain distance after picking up the brake disc, and then move towards the center point of the bin’s upper surface in a tilted manner.