If there are multiple pick points set in the 3D model, how can I obtain the name or identifier of the pick point for convenient feedback to the robot for further processing?

In the model editor, you can assign labels to the corresponding pick points, as shown in the image below.
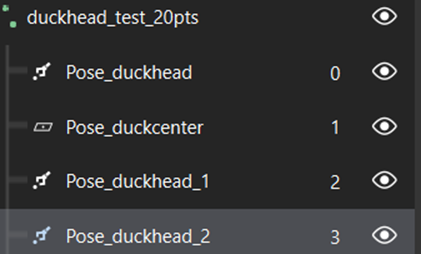
After 3D matching, corresponding labels will be generated as output. If you used “map to multiple pick points”, the mapped poses will also include labels.

The process flow for mapping multiple pick points can be referenced as follows:

