When a robot is picking a workobject, how can we detect collisions between the workobject, the point clouds, and the bin walls?
In Mech-Viz, collision detection can be used to detect potential collisions and display the detected collisions in the 3D simulation area, so that projects can be adjusted based on the displayed collisions.
-
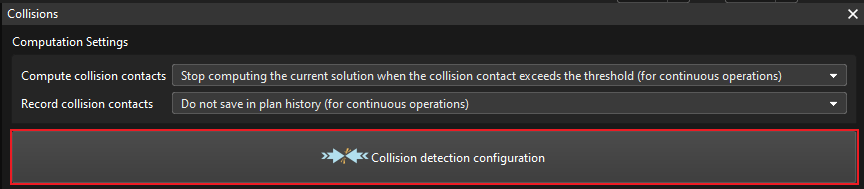
Click Collisions in Mech-Viz to configure collision detection, as shown below.

-
Click Collision detection configuration in the Collisions tab for further configurations on point clouds, tools, robot links, and held workobjects, as shown below.
In the Collision Detection Configuration tab:
-
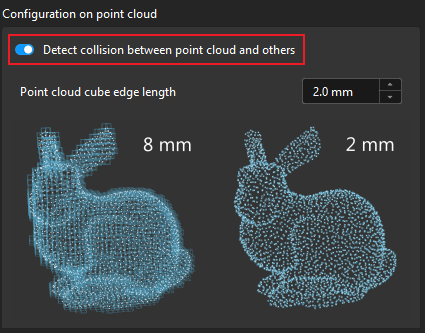
Click the Detect collision between point cloud and others option in the Configuration on point cloud pane on the left to enable the detection of collisions between point cloud and other objects.
-
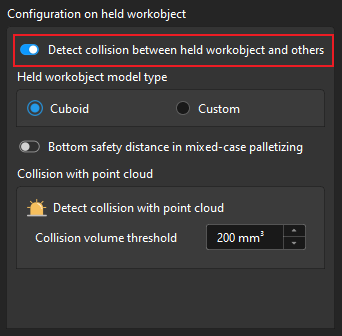
Click the Detect collision between held workobject and others option in the Configuration on held workobject pane on the right to enable the detection of collisions between the held workobject and other objects.
-
For details on how to configure collision detection in Mech-Viz, see Collisions.