Intro
In vision applications, the region of interest (ROI) only occupies a portion of the entire imaging area, and outside the ROI are interference data. These interference data may have a negative impact on the stability and speed of vision processing.
Therefore, during vision processing, specific measures need to be taken to remove the background (interference) point cloud.
Available Steps and Applicable Conditions
Currently, there are two recommended steps for removing background point clouds:
- “From Depth Map to Point Cloud” (its “Remove Background by Depth Image” feature)
- “Extract Point Cloud in 3D ROI”
For scenarios where the background is fixed and does not change over time, it is recommended to use both 1 and 2 to achieve the optimal results.
For scenarios where the background is not fixed and changes over time, it is recommended to use only 2.
Step “Extract Point Cloud in 3D ROI”
This Step selects a concentrated Region of Interest (ROI) to remove the point cloud outside the ROI.
For detailed usage instructions, refer to the user manual.
Step “From Depth Map to Point Cloud” with Feature “Remove Background by Depth Image”
This Step subtracts the known background depth map from the newly acquired image and converts the resulting depth map after subtraction into a point cloud, thereby obtaining a scene object point cloud with the background removed.
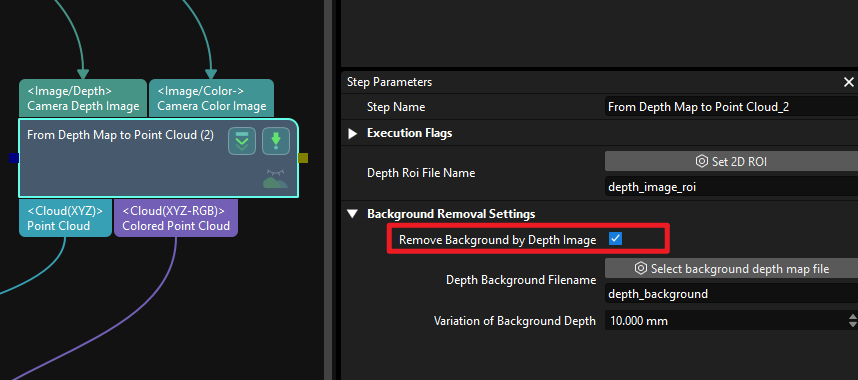
For detailed usage instructions, refer to the user manual.
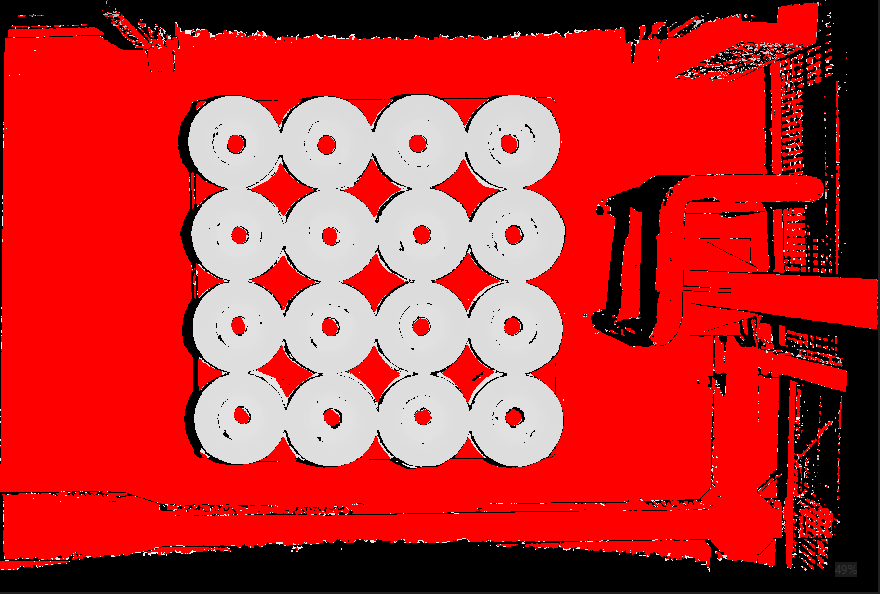
Here are examples demonstrating the effect of this step. The point count in the point cloud can be observed decreasing from 1,714,437 to 472,075, significantly accelerating the processing speed of subsequent vision processing while enhancing stability.
Top image: Depth map before removing the background
Bottom image: Depth map after removing the background (Red represents the removed portion, i.e., the part overlapping with the known background depth map)

Top image: Point cloud before removing the background
Bottom image: Point cloud after removing the background

