My robot has a 30 degrees rotation based on world frame, how can i show it in Mech-Viz?
1 Like
- save Mech-Viz project to json
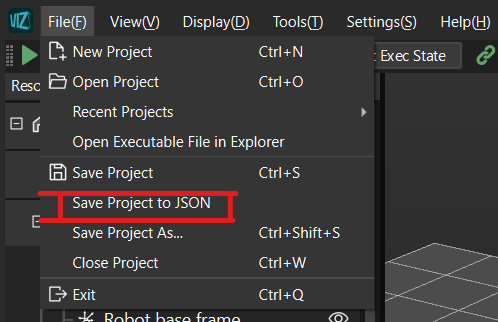
- change the parameters of robot pose
- And the robot will show with 30 degrees.

In addition, to the above answer you might wonder how to obtain the angle the robot is mounted automatically.
You can proceed as follows:
- Calibrate the camera to the robot.
- Create a Vision project where you take an image of a flat surface. The surface will resemble the x-y surface of the world coordinate system (e.g. the surface could be the table where the bin would be placed).
The result of “Calc Poses and Dimensions from Planar Point Clouds” will be the orientation of the world frame. If you want the orientation to be different, then transform the pose.
The result of the “Invert Pose” step will be the robot pose that you have to insert into the Mech-Viz.json file under “robots”/“pose”. - (Optional). Scene objects are defined relative to the world frame. Therefore, if you update scene objects (e.g. the pickbox) then you need to transform the scene object pose to the world frame:
Use the same robot pose that you specified in Mech-Viz.json.


1 Like