I am using a camera to capture point clouds of workpieces in order to create templates. I then manipulate these pick points to create templates.
However, due to slight discrepancies during the picking process, I found that the manipulated pick points are not as precise as desired. I hope to make subtle adjustments through pose editing.
The challenge is that there is a certain angular deviation between the template or pick points and the world reference frame, and Mech-Vision only allows adjustments based on the translation amount in the world reference frame.
Could you provide guidance on how to handle this situation?
Thank you for the feedback.
Currently, in Mech-Vision, the Parameters and Display pane allows for adjustments of pick points based on the reference frame of the points during editing.
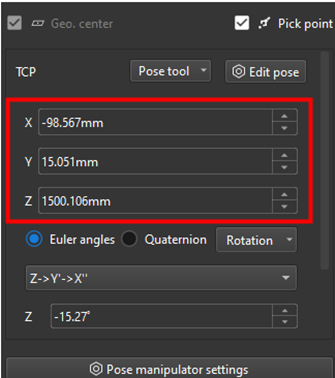
When making adjustments, data in the red box of the image below is adjusted based on the world reference frame:
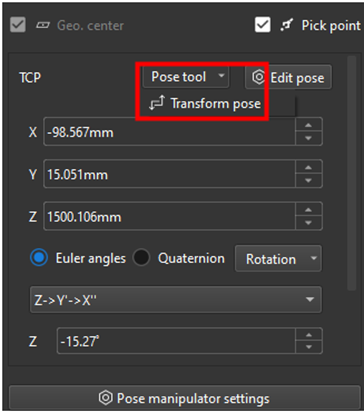
We need to select the “Transform pose” option under the “Pose tool”:
Clicking will pop up the window shown below:
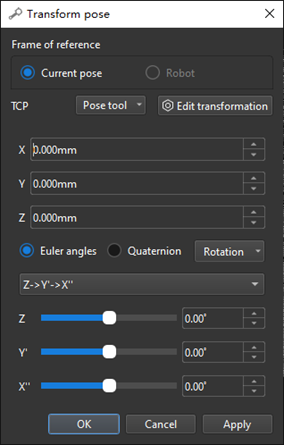
In this window, you can make fine adjustments based on the pose’s reference frame, and this window does not interfere with the 3D interface’s viewing operations. Simultaneously, while adjusting the pose, you can also examine the relationship between the template and the pick points, achieving a more effective adjustment result.
Currently, this function is relatively inconspicuous. We will optimize it in subsequent versions.
Thank you again for your feedback.