Alarm

Possible Causes
- Robot collision or prolonged power outage resulting in data loss.
- Sudden power loss during high-speed robot operation.
- Bumps during robot transportation on a truck.
The above situation may cause a displacement in the robot, resulting in position data different from the data recorded during the last power-off. Therefore, it is necessary to confirm the zero points of each axis of the robot based on the original position.
Solution
-
Click SYSTEM INFO → SECURITY.
Select MANAGEMENT MODE from the drop-down list. The default password for MANAGEMENT MODE is 9999999999999999 (the #9 key 16 times).
-
Click ROBOT → SECOND HOME POS to open the SECOND HOME POS interface.
-
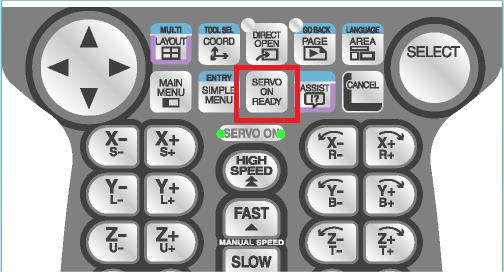
In the SECOND HOME POS interface, press the SERVO ON READY and grasp the Enable switch to turn on the servo power. The alarm 4107 appears again. Click the RESET button to reset the alarm.

-
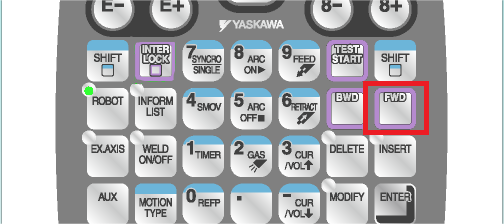
Back to the SECOND HOME POS interface, press the SERVO ON READY and grasp the Enable switch as instructed above to turn on the servo power, and press the FWD button to move the robot forward to the second origin position until all data are zero.
-
Click the DATA, then click the popped-up CONFIRM POSITION.
The “Home position checked” message appears on the screen. The alarm 4107 is resolved.






