For instructions, refer to docs: How To Configure DO or DI Signals for DENSO Robots in Master-Control Communication?
Reference pictures:
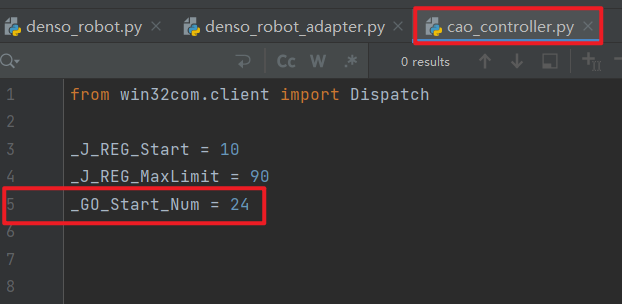
Modifying the Starting Position of Robot’s DO Corresponding to Mech-Viz
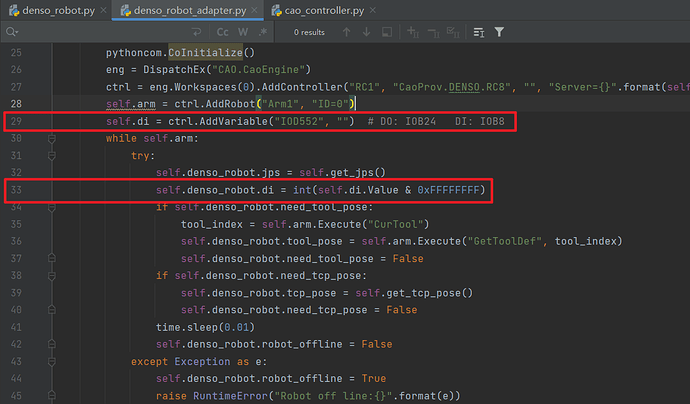
Modifying the Starting Position of Robot’s DI Corresponding to Mech-Viz
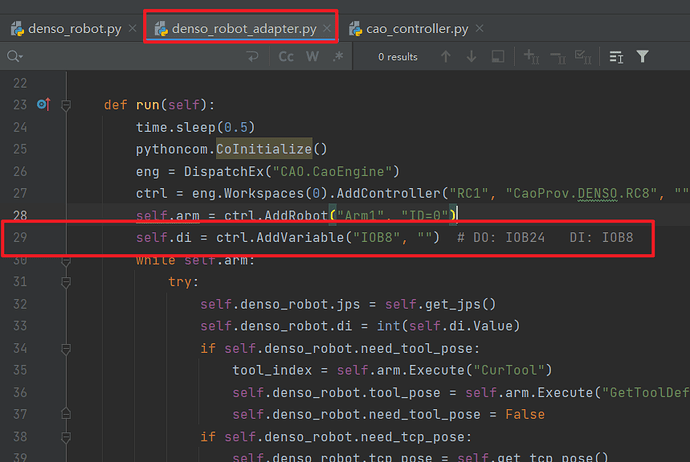
Expanding the Number of Robot DI Monitored by Mech-Viz