Issue
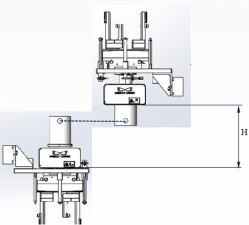
When installing a camera with an arm-mounted (EIH) configuration, if the robot arm has limited reach, the common practice to achieve the desired field of view is to elevate the camera height. In actual operations, there is a potential risk of collision between the camera body or its bracket and the robot, thereby limiting the 6th axis rotation angles of the robot.
Note
-
If the 6th axis rotation of the robot is restricted, unless robot reachability is confirmed through simulation, the following conditions (flange rotation limitations) are generally challenging to achieve:
- The robot will face difficulty in picking workpieces with varied poses within deep bins in a random order.
- The robot needs to work on multiple workstations around itself, and working on each workstation involves diversified poses.
- The robot is installed at a low height, ancountering situations where a sharp angle is formed between the 5th and 4th axes, requiring flange rotation.
-
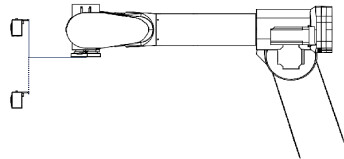
Consider mounting the camera lens facing upward and. During image-capturing, rotate the fifth axis (gripper facing upward) to position the camera downward. When picking a workpiece, rotate the fifth axis again to orient the gripper downward for gripping, with the camera lens facing upward. This method is generally not recommended under normal circumstances.